Plan2Map
A Multimodal Benchmark for Document-Grounded Geospatial Boundary Reconstruction from Planning Records
2026
fabian.degen@tuta.com; oishideb@robots.ox.ac.uk; yu.jialin@outlook.com
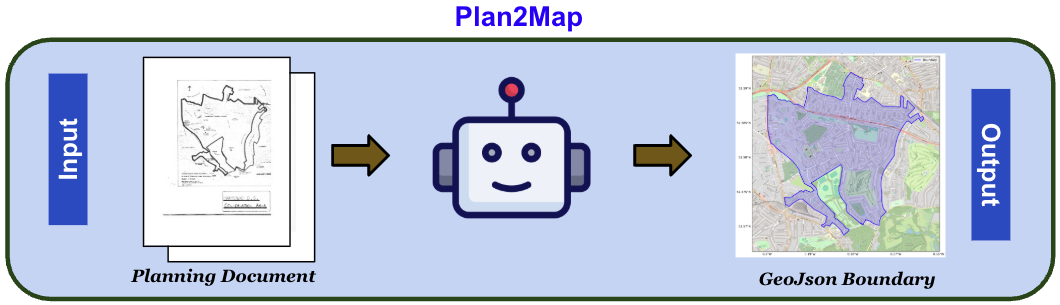
We introduce Plan2Map, a 208-case multimodal benchmark for document-grounded geospatial boundary reconstruction from UK planning records. Given only a source planning document, a system must reconstruct a valid geospatial boundary from notice text, schedules, map plates, map labels, and boundary annotations; the reference GeoJSON is held out for scoring.
The Plan2Map Benchmark
Plan2Map contains 208 manually reviewed UK Article 4 Direction records, spanning 1958–2025 and covering 29 local planning authorities across England. Each released case bundles three artefacts:
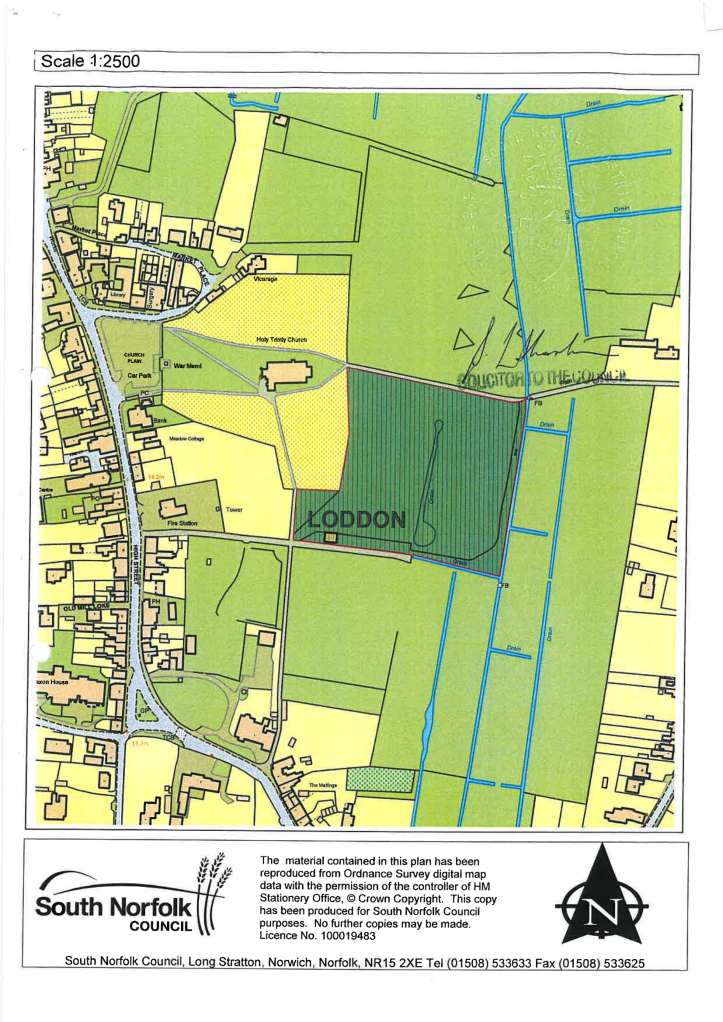
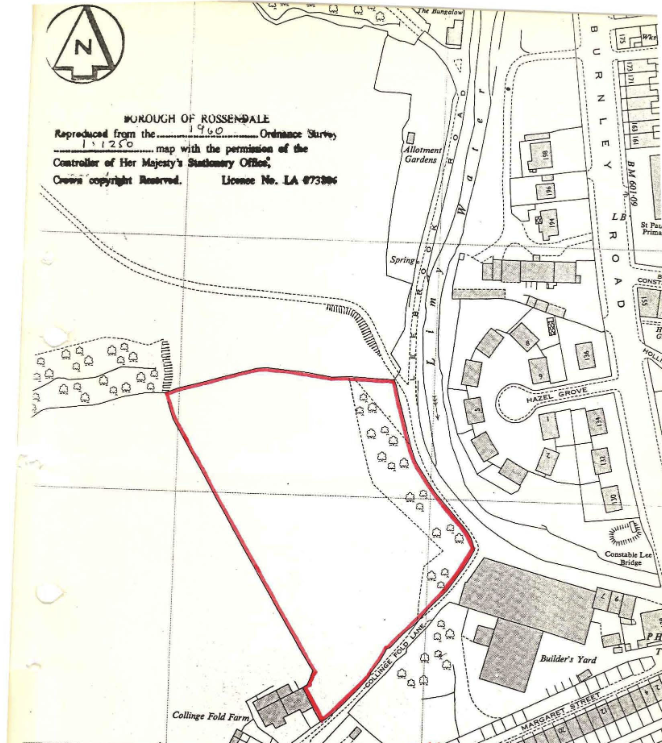
- The source planning PDF — text, schedules, maps, labels, and boundary annotations.
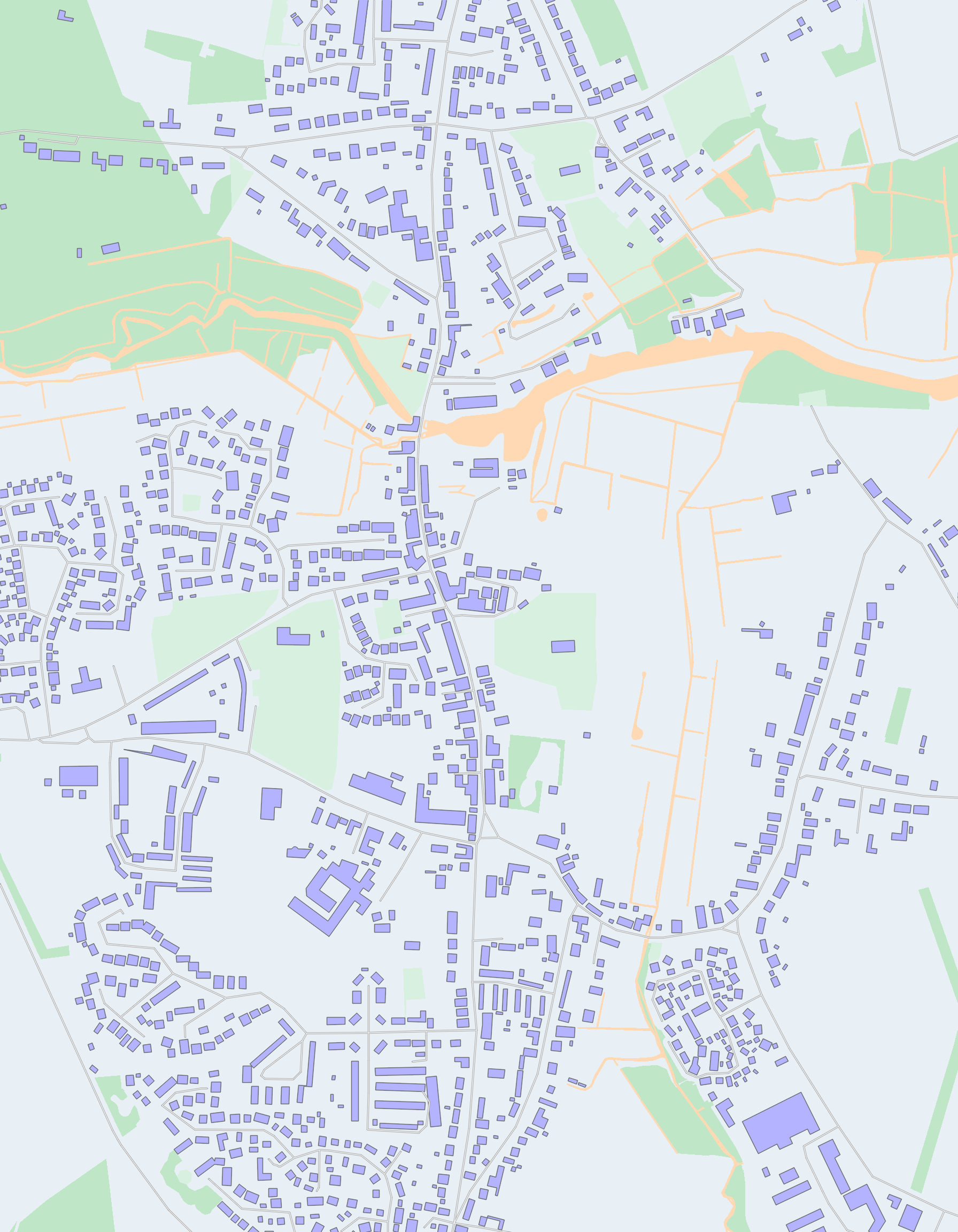
- A verified reference GeoJSON (Polygon or MultiPolygon), held out as the evaluation reference.
- A rendered location-map PNG overlaying the reference geometry on an OpenStreetMap basemap.
Cases span scanned and born-digital documents, varied map quality, and boundaries ranging from simple parcels to irregular or multi-part geometries. Metadata covers local authority, site description, document quality (✅ Good / ⚠️ Bad), document colour (📄 White / 📜 Yellow), boundary shape, and shape complexity (🟢 Easy / 🟡 Medium / 🔴 Hard).
Examples from the Dataset
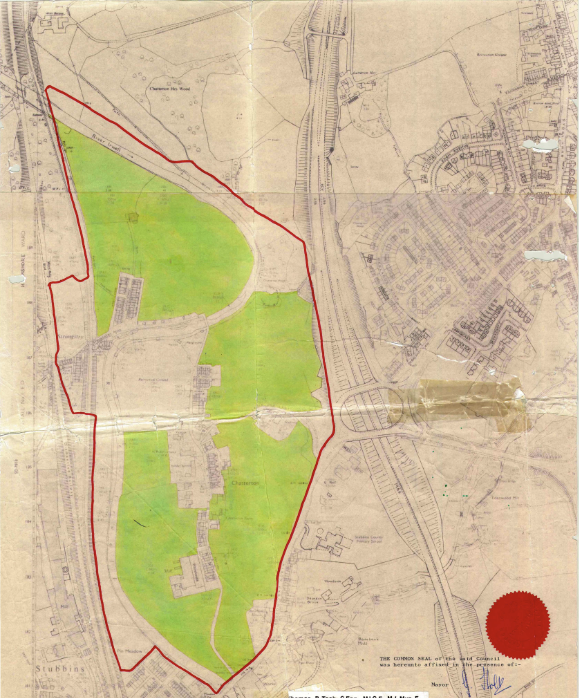
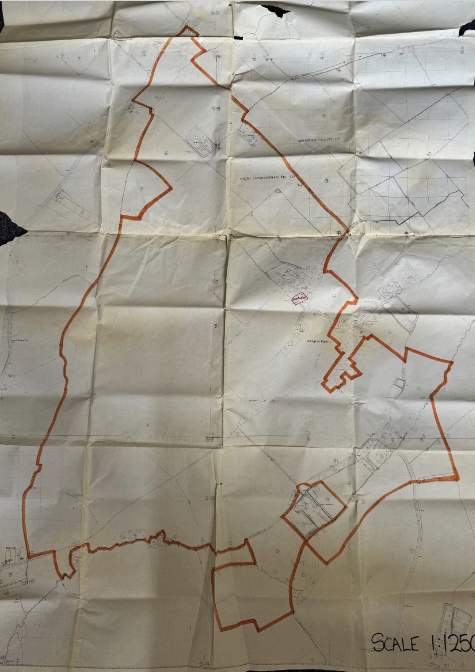

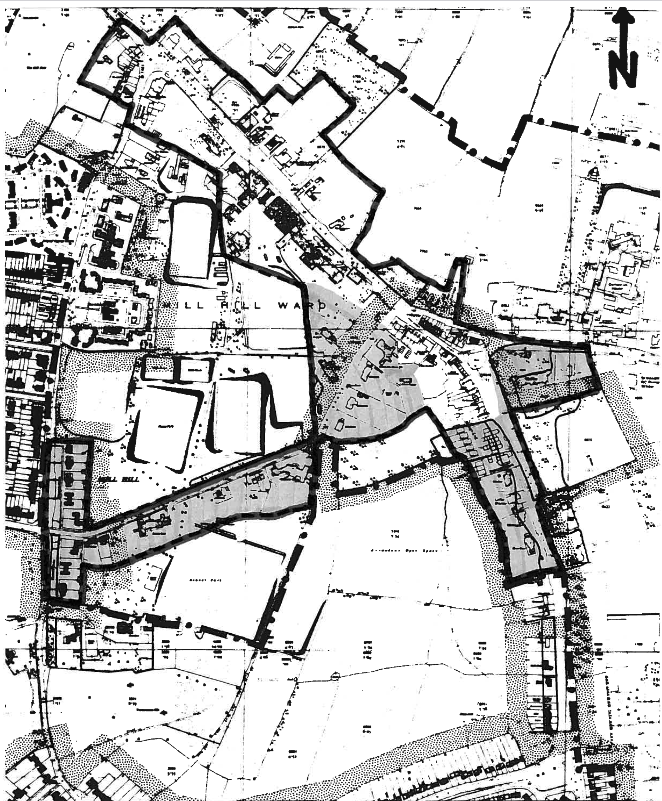
Representative cases across the 3 × 2 × 2 strata (shape complexity × document colour × quality). Auto-advances every 4 seconds — hover to pause.
GeoPlanAgent
We propose GeoPlanAgent, a document-grounded, geospatial-tool-in-the-loop system that decomposes the task into evidence extraction, localisation, map registration, boundary segmentation, projection, and verification. Rather than asking a multimodal model to generate a geospatial polygon in one pass, GeoPlanAgent mirrors the task structure with specialised components.
Pipeline
- Reader — single multimodal LLM call that converts the raw PDF into a typed record of spatial evidence (postcodes, grid references, addresses, road and place names, map labels, printed scale, page-level metadata).
- Worker — produces the final GeoJSON via a tool-calling loop:
- Locate sub-agent — queries an OS Open Names gazetteer to return an approximate map centre with an uncertainty radius σ.
- Map-tile matching — aligns the planning map against OS Open Zoomstack tiles using MINIMA-LoFTR + RANSAC.
- Boundary segmentation — SAM 3 with LoRA adapters, fine-tuned on planning maps with style-transfer augmentation.
- Projection — projects the mask into WGS84 via the recovered affine transform.
- Critic (optional) — independent LLM that reviews the top-3 candidates post-commit and may approve, switch, or request re-localisation.
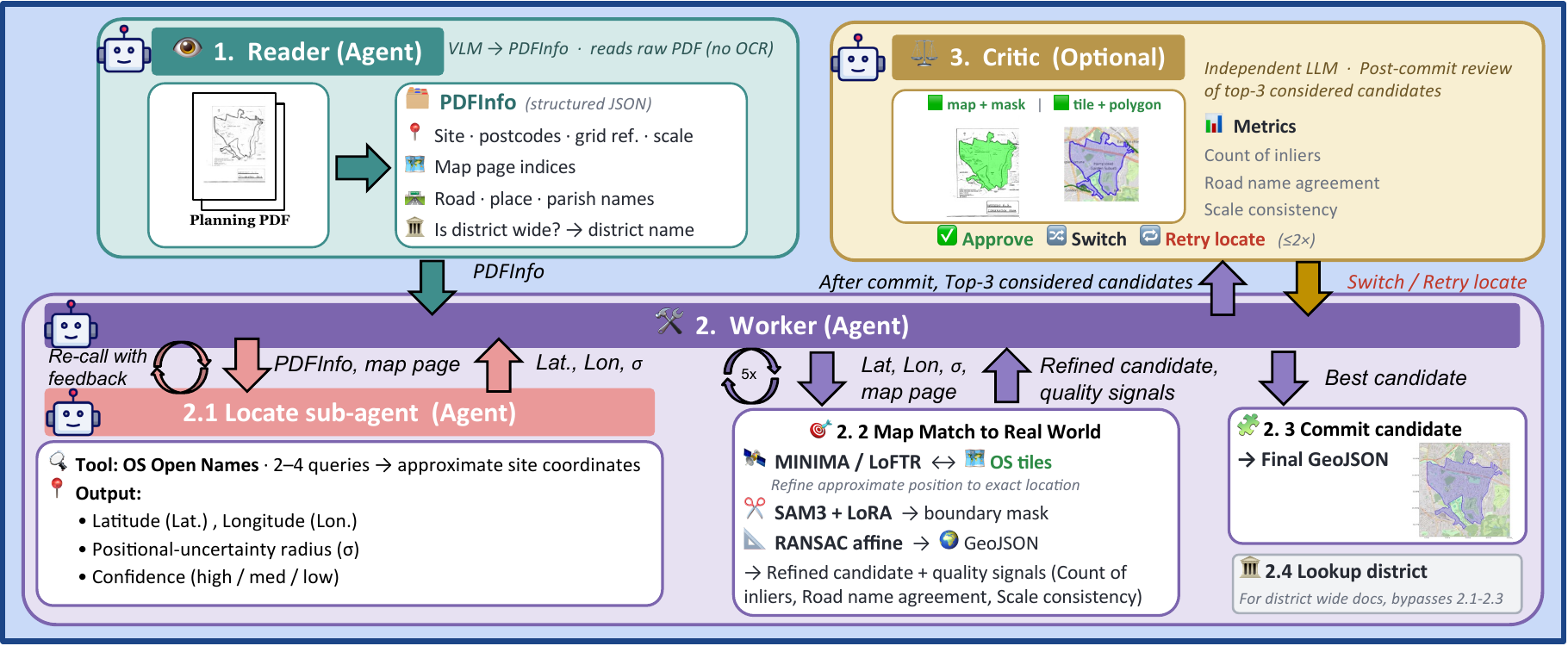
GeoPlanAgent workflow.
Explore the pipeline
Click any stage of the pipeline to expand it and look at the inputs and outputs of that step. The Map registration page opens an interactive animation showing how MINIMA-LoFTR is used to refine the initial location from the Locate sub-agent.